Après une première partie évoquant les moyens qu’utilisent les avions pour devenir les plus discrets possibles, cette seconde partie détaillera les moyens permettant de contrer cette furtivité dans le spectre électromagnétique.
Article écrit par Yves Pagot, en collaboration avec Bruno Etchenic.
« Le meilleur ami de mon ennemi est… Mon ami ». Contrairement à l’adage populaire, les radars modernes sont à la fois les pires ennemis des avions furtifs et… de par leur discrétion, leur meilleur amis.
Nous vous détaillerons premièrement quelques éléments techniques liés à la détection des Radars, préalable nécessaire pour comprendre pourquoi les avions dits « furtifs » sont si difficiles à détecter, et quelles sont les pistes pour les débusquer, et avec quels types de Radar.
Tout d’abord, reconnaître cet objet bizarre :
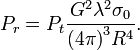
Ou Pr = puissance reçue
Pt puissance émise
Sigma = SER (surface équivalent radar)
G = gain de l’antenne (sensibilité pour simplifier à l’extrême)
R = distance entre l’émetteur et la cible.
Il s’agit de l’équation (simplifiée, si si) radar. Que nous dit-elle ?
– La puissance reçue dépend directement de la puissance émise (ca paraît évident, mais il fallait le rappeler) et de la SER de l’objet « détecté ». En fait, la vraie donnée est l’énergie, soit la puissance multipliée par le temps d’émission.
– La puissance reçue dépend du carré du gain de l’antenne (sensibilité)
– La puissance reçue est inversement proportionnelle au carré du carré de la distance ! Et donc pour doubler la portée, il faut multiplier la puissance par 16.
Pour augmenter la capacité de détection d’un radar, on a donc deux possibilités : augmenter la puissance d’émission ou la sensibilité de l’antenne. Comme la sensibilité est plus importante (puissance reçue proportionnelle au carré du gain), la deuxième solution semble meilleure. Néanmoins, elle se heurte à un problème, le bruit de fond (appelé clutter). En dehors du bruit de fond généré par l’électronique elle-même, l’atmosphère est remplie de particules, de gouttelettes d’eau (nuages, pluie, grêle), d’insectes voire simplement de turbulences qui peuvent provoquer un écho radar, tout comme le sol. Les radiations naturelles (radiations cosmiques etc.) peuvent ajouter de la « friture » sur la ligne…
Dans cette figure, on voit comment un signal peut être « noyé » par le bruit de fond
Dans ce premier cas, on voit comment un signal reçu supérieur au bruit de fond (rapport signal/bruit env. 5) est aisément détectable.
Dans ce deuxième cas, le signal reçu est noyé dans le bruite de fond (rapport signal/bruit = 1,4).
C’est l’objectif des avions furtifs américains : diminuer la réflexion des ondes radars en direction de la source du signal (majoritairement en les « déviant » vers d’autres directions).
En principe donc, un radar ne peut détecter un signal inférieur à un certain seuil qu’il détermine en fonction du bruit ambiant. L’augmentation de la sensibilité n’aurait pas de sens, sauf que…
Votre radar joue à la bataille navale ! … Et comme une chatte, il reconnait ses petits.
Le processus de détection jusqu’à l’affichage s’une solution pour le pilote se déroule en 6 étapes :
– 1 Détection
-2 Corrélation et association
– 3 Initiation d’une piste et stockage de l’information
– 4 Génération d’une fenêtre de tracking
– 5 Prédiction des évolutions, affinage de la piste, filtrage mathématique
– 6 Affichage.
En pratique, un processeur dédié (ATD, Automated Track and Detection) va réserver un espace mémoire à chaque portion de l’espace scannée par le radar (on parle de « cellule »). Ces cellules correspondent peu ou prou à résolution du radar.
Si il détecte un écho dans une de ses cellules, il va dire « touché ! » et va immédiatement surveiller les cellules adjacentes (d’où l’allusion à la bataille navale) et conserver les enregistrements de celles-ci (Il est à noter que les radars modernes trichent et vont tout de suite orienter le faisceau sur les cases adjacentes, on parle d’active tracking), en ouvrant une « fenêtre » de détection. Il va ensuite observer s’ il retrouve un écho dans la même fenêtre, estimer sa forme, son comportement et déterminer s’il s’agit bien d’un avion ou d’une fausse alerte (track before scan).
La position d’antenne lors de l’émission permet de déterminer l’azimut de la cible, l’instant de réception permet de calculer le temps mis par le signal pour faire l’aller et le retour (les instants d’émission sont connus) d’où on déduit la distance de la cible, le décalage de fréquence due à l’effet doppler permet de calculer la vitesse radiale de la cible. L’effet Doppler est responsable de la différence de fréquence à laquelle nous entendons une sirène de pompiers par exemple, selon qu’elle s’approche ou s’éloigne.
Avec ces trois paramètres on ne peut déterminer quel est le vecteur de déplacement de la cible. Cela pourra être fait après plusieurs balayages qui détermineront une vitesse par rapport à l’avion émetteur, ce qui sera effectué grâce à l’exploitation des fenêtres citées plus haut. Ce processus va lui permettre d’associer les échos avec des comportements crédibles d’aéronefs, de valider la piste et la présenter au pilote.
Malgré tout, une telle multitude de signaux est reçue par le radar, qu’il doit au moins identifier ceux dont il est à l’origine. Prenons un exemple : un radar émet avec une puissance de 10kW en direction d’une cible possédant une SER de 1m située à 50 Kms (longueur d’onde 5 cm) . Quelle sera la puissance du signal reçue par une antenne possédant un gain de 40 dB (valeur cohérente avec la longueur d’onde et la taille des antennes de chasseurs)? L’équation radar nous dit environ 3.10-17W. A titre d’exemple, une sensibilité typique de radar de contrôle aérien est de l’ordre de 10-14. Si l’on ajoute donc le bruit de fond rajouté le signal devrait être indiscernable du bruit de fond.
Ce sera encore plus vrai d’un avion furtif ayant une SER de 0.01 m2 et donc un rapport signal/bruit 100 fois un inférieur. Pour le repérer au même moment, il faudra multiplier la puissance par 20 !
Pour arriver à repérer un avion « furtif » comme le F22, un radar doit être capable de distinguer un signal extrêmement faible du bruit de fond.
A propos, la SER ne correspond pas, contrairement à une croyance courante à la surface d’un plan perpendiculaire au faisceau incident, mais à celle d’une sphère…
Le radar a donc besoin d’un système lui permettant d’identifier les retours de ses propres émissions (ses petits chatons). Vous êtes vous déjà demandé comment votre GPS arrive à identifier les signaux satellites émis avec une formidable puissance d’environ 25W à plusieurs milliers de Kms dans le bruit ambiant ? C’est simple (enfin… à dire), ces signaux possèdent des « en-têtes » connus et reconnaissables. Pour les retrouver, le récepteur dispose de puces massivement parallèles composées d’éléments appelés corrélateurs. Ces puces possèdent plusieurs dizaines de milliers de canaux qui vont analyser tous les signaux reçus et identifier les bons.
En fait, un radar n’émet pas une impulsion qui reviendrait sous forme d’un « ping » comme dans les films de sous marins (RIP M. Clancy), mais un train d’ondes, un peu comme une phrase musicale. Comme il n’est pas bête, il sait quelle mélodie il a envoyé et reconnaître son écho. En utilisant un système dont le principe est similaire, il va reconnaitre le retour de ses propres signaux parmi tous ceux qu’il reçoit. Bien sûr, ce processus est très gourmand en puissance de calcul.
Pour corser le tout, l’utilisation d’un radar va être compliquée par l’existence de systèmes d’alerte, les RWRs (Radar Warning Receivers). Ceux-ci sont tellement sensibles et tellement perfectionnés qu’ils permettent de localiser avec suffisamment de précision un émetteur radar adverse pour donner parfois une solution de tir (Un des points fort de Spectra).
Un radar cherchera donc à être le plus discret possible, et ce d’autant plus que la furtivité fait partie du concept de l’avion. Plus un avion est furtif, plus grand sera son besoin d’un radar « LPI » (Low Probability of Interception) ! Il ne servirait à rien d’avoir un avion qui ne sera que difficilement repéré par un radar si c’est pour se « dénoncer » via ses propres émissions.
Pour ne pas être détectés, les radars vont utiliser plusieurs techniques :
– Le « frequency hopping » ou saut de fréquence. Le radar va changer de fréquence très rapidement (environ 1000 fois par seconde pour l’ANPG77 du F22 par exemple). Essayez avec votre autoradio de suivre une station qui fait ca…
– La gestion de puissance (power management) : plus une cible est proche, moins la puissance émise dans sa direction sera importante.
– Faibles « lobes secondaires » (« directionnalité » du faisceau)
– Motif irrégulier de balayage (afin d’éviter des répétitions rythmiques)
– Des cycles de fonctionnement très rapides
– L’étalement du signal dans le temps
Au final, il s’agit d’envoyer une quantité d’énergie juste suffisante en direction d’un objet, soit en la divisant dans le temps et les gammes de fréquence, soit en envoyant une impulsion longue mais de très faible intensité qui sera ensuite compressée. Cette compression du signal retour lui permettra de « profiter » de la durée d’émission du signal d’origine.
Pour comprendre la compression :
Un radar enverra un signal dans l’espace, un signal à l’image d’une note de musique (plutôt une mélodie en réalité). En retour, il recevra tout une multitude de signaux, dont la majorité est constitué de bruit. Dans le cas de la détection d’un avion non furtif, le Radar reconnaîtra ses propres notes de musique, ce qui permettra d’identifier clairement un objet. Mais dans le cas d’un avion furtif, la musique renvoyée sera très faible, et au même niveau sonore que le bruit. Impossible donc de l’identifier à la première écoute, et l’avion furtif se fond dans le bruit ambiant. C’est là qu’intervient la compression. Le bruit est composé de séquences aléatoire de fréquences. Alors que la note envoyée, puis retourné au radar est constante en permanence. Imaginez une piste audio que vous écoutez, avec une note de musique bien particulière jouée de manière régulière au milieu du bruit. Vous ne la dissocierai pas du bruit. Maintenant, si vous accélérez la piste audio, les notes de musique d’un niveau égal vont se concentrer, ce qui en augmentera le volume, et permettra de la repérer. Voilà comment, par le biais de cette technique, est-on capable de repérer un avion furtif. Cela nécessite une grosse capacité de calcul, mais les processeurs évoluent en permanence, alors que le design des avions furtif n’évoluera pas. Rien qu’en France, le Mirage 2000 a connu trois versions différentes de Radar en seulement 19 ans (RDM, RDI et RDY).
Un peu d’humour par Vangeure masquait, histoire de détendre l’atmosphère.
Un rapport Canadien de 1991 estimait la sensibilité nécessaire aux RWRs pour détecter un radar LPI à environ -100 dB (à l’époque inaccessible selon eux), tout en précisant que celle-ci pourrait être diminuée à l’aide de récepteurs à large bande.
De tels récepteurs, utilisant des DRFMs (Digital Radio Frequency Memory), capables de recevoir et numériser en temps réel des signaux sur une large bande de fréquence sont maintenant disponibles ou en cours d’expérimentation. Bien sûr, à nouveau ces systèmes demandent de fortes puissances de calcul.
On voit bien que l’on a un jeu du chat et de la souris, les RWRs étant favorisés par la distance deux fois moindre que le signal doit parcourir, les radars parce qu’ils « connaissent » le signal attendu (nature et durée de l’impulsion d’origine).
Tout cela est bien beau, mais comment utiliser ces capacités des radars pour améliorer la détection des avions furtifs dans l’avenir?
1) Les radars à grandes longueurs d’ondes intégrés aux réseaux de défense
En 1999, l’armée Serbe abat un F117 américain. Comment y sont ils parvenus ? En grande partie grâce à l’obsolescence de leur matériel.
Les avions furtifs ont des formes conçues soit pour renvoyer les ondes dans une autre direction que le faisceau incident (F117, F22, F35), soit pour les « disséminer » dans toutes les directions (B2). Je m’en tiendrai au premier cas, cet article étant suffisamment long…
Ces avions sont conçus pour déjouer les radars utilisant la bande X (longueur d’onde de quelques centimètres). Cette bande est utilisée car elle présente le meilleur compromis entre portée, précision et absorption par l’atmosphère.
Les formes anguleuses de ces avions (à facettes), comme Bruno l’a expliqué dans cet
article permettent de dévier les ondes dans des directions autres que celle de l’adversaire. Par contre, des radars utilisant des longueurs d’onde plus grandes (mètres) seront moins précis, mais les formes des chasseurs furtifs (facettes trop petites) ne leur permettront pas de les dévier. Ainsi, un radar de la deuxième guerre mondiale serait incapable de le localiser précisément mais détecterait presque à coup sûr un F22.
Les raisons étant complexes (et je ne suis pas un spécialiste de la mécanique ondulatoire), faisons une (mauvaise) analogie.
Vous vous trouvez face à un mur en dents de scie dont les arêtes (verticales) sont espacées de quelques centimètres. Si vous jetez dessus un bille, elle rebondira inévitablement (sauf si vous êtes très chanceux et que vous la jetez pile sur une arête) vers la droite ou la gauche. Si vous jetez des milliers de billes, seules quelques unes reviendront vers vous. De même l’avion recevra un signal radar très faible. Par contre, si vous jetez dessus un ballon de foot, il rebondira la plupart du temps vers vous (et vous détecterez le mur ce qui vous évitera de rentrer dedans tête la première).
Mais ces radars sont volumineux, leurs émissions très repérables, et imprécises. Ils doivent donc être utilisés comme « donneurs d’alerte » (early warning), permettant ainsi d’orienter des systèmes plus précis vers une portion de l’espace.
Ainsi guidés, les radars d’acquisition, au lieu de scanner l’espace au hasard, vont pouvoir diriger une grande quantité d’énergie vers l’azimut indiqué, repérant beaucoup plus facilement les avions furtifs.
Radar israélien longue porté « Super Green Pine »,
opérant en bande L. Il posséderait une portée de l’ordre de 800 Kms.
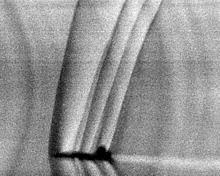
Un radar à diffraction est un ensemble de deux radars, un
émetteur et un récepteur. Il est prévu pour fonctionner comme une barrière et
détecter les cibles qui passent entre l’émetteur et le récepteur. L’énergie
transmise est diffractée par les
perturbations qu’engendre le passage de la cible (effet
« Schlieren »)
« Photographie » de Schlieren du passage d’un T38
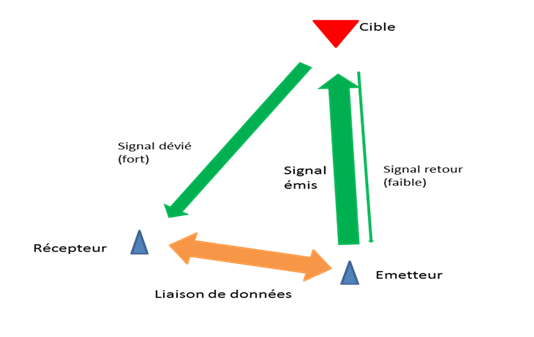
3) Radars multistatiques.
Un radar bistatique est un radar dont l’émetteur et le récepteur sont séparés. La distance entre l’émetteur et le récepteur est de l’ordre de la distance théorique de la cible. Inversement, un radar dont l’émetteur et le récepteur sont au même endroit est appelé « radar monostatique ». C’est la configuration classique pour un radar, aussi le terme « monostatique » est utilisé pour distinguer ce type de radar des radars « bistatiques » et « multistatiques ». (wikipedia)
Ce type de configuration est « idéal » pour détecter les avions furtifs qui dévient les ondes. En effet, le récepteur étant séparé de l’émetteur, il recevra les ondes réfléchies comme dans le schéma suivant.
Au début de l’article j’évoquais la difficulté pour un radar à « retrouver » ses signaux propres dans le bruit de fond. Il est encore bien plus compliqué pour un récepteur d’identifier les trains d’ondes émis par un autre émetteur. Pour cela (et que les signaux reçus soient exploitables), il faut une coordination spatio-temporelle parfaite. Le receveur doit savoir exactement ou il est, et ou était l’émetteur lors de l’émission du signal, et quel signal a été émis. Cela est possible de deux façons : d’une part, grâce à une liaison de données tactiques à très haut débit, d’autre part grâce à des en-têtes qui pourraient être contenu dans chaque signal émis par le radar (comme dans les signaux GPS).
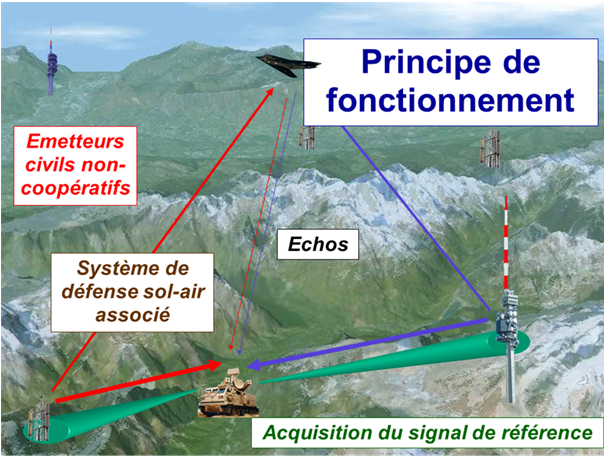
4) Les radars passifs
Les radars passifs utilisent la réflexion des ondes environnantes (FM, TV etc.) sur un objet volant. Ce sont donc des sortes de radars multistatiques qui utilisent des émetteurs d’opportunité ! Les signaux intéressants possèdent en général des données de synchronisation que l’on utilise pour dater l’émission (par exemple signaux TV). Ce type de radar nécessite donc de posséder une « cartographie » précise en temps réel de l’environnement électromagnétique afin de pouvoir distinguer ses variations.
Schéma de principe de fonctionnement d’un radar passif.
Plusieurs modèles sont déjà commercialisés dont le Thalès HA100. Ce radar possède une portée de 100 Kms et une précision de quelques centaines de mètres. Par contre, il fonctionne par réflexion des ondes FM et n’a pas de capacité de résolution 3D (il ne peut calculer l’altitude). Des prototypes qui utilisent les ondes DVB-T (TNT) ont été développés depuis qui permettent de calculer aussi l’altitude, mais ils possèdent une poindre portée.

Photo d’un radar HA100 présenté au Bourget en 2007
Des prototypes qui utilisent les ondes DVB-T (TNT) ont été développés depuis qui permettent de calculer aussi l’altitude, mais ils possèdent une poindre portée. Un tel prototype, SINBAD, a été testé de façon prometteuse mais non encore satisfaisante en 2010 sur les aéroports de Francfort et Brno.
C’est une technologie en pleine évolution : récemment, un présentateur « 6D2M » financé par la DGA, qui devrait donner naissance à un système permettant la détection en temps réel de cibles lentes et de faible SER, en 3D, à partir de données fusionnées issues de plusieurs récepteurs. L’objectif étant d’étudier les performances d’un récepteur bimode actif/passif.
L’OTAN mène par ailleurs des actions de recherche sur le sujet, dont la RTG (Research Task Group) 186 qui étudie l’application de radars passifs aéroportés.
En conclusion, les radars modernes sont à la fois les meilleurs ennemis et les pires ennemis des avions dits furtifs. La furtivité, amène un avantage certain en terme de temps, soit en retardant la détection, soit en obligeant à envoyer plus d’énergie dans une certaine direction. Les avions furtifs ne le restent que s’ils contrôlent leurs émissions et ne présentent aux systèmes radars adverses que leur « meilleur profil », ce qui implique une préparation de mission optimale utilisant des données de renseignement électronique (préalablement établies ou recueillies au cours de la mission). Ils ne sont donc pleinement efficaces que dans le cadre d’un environnement optimal d’utilisation (guerre réseau centrée).Au jeu du chat et de la souris, le chat, représenté par les moyens de détections qu’ils soient disposés au sol ou aéroportés dispose d’une liberté d’évolution dont ne dispose pas la cellule d’un avion conçu à son origine pour être furtive. La souris ne dispose donc que d’un avantage qu’au moment de sa conception, basé sur les moyens de détection à l’instant T. La forme et les matériaux de la souris ne pourront donc pas évoluer, à moins de concevoir un nouvel avion. Et vous l’aurez compris, le problème ici étant que la conception d’un avion de combat associé à leur longue durée de vie actuelle est désormais d’au moins 40 ans. L’avion furtif verra donc son avantage s’estomper aussi rapidement qu’évoluera les moyens de détection adverse.













5 Comments
Hadrien
Great ! Très bien détaillé, merci beaucoup ^^! Bon travail !
Anonyme
Merci Hadrien
Anonyme
Vraiment très intéressant , j'aimerais avoir une telle furtivité sur mon
véhicule personnel mais difficile vu les bandes utilisées :
K , Ka wide band , Laser 905nm
Anonyme
Pour les bandes K, il faudra attendre le leurre éjectable issu du programme LEA
thierry
Merci beaucoup, votre article est passionnant !