
Airlander 10,
Crédit PA
Plus de 6 mois après son écrasement à l’atterrissage, l’Airlander 10 devrait prochainement reprendre les airs. Depuis quelques mois déjà, Hybrid Air Vehicles travaille à la remise en état de vol de son aéronef, et a pour cela apporté plus de soixante modifications. L’enquête de l’Air Accident Investigation Branch, l’équivalent britannique du BEA (Bureau d’Enquêtes et d’Analyses) français, a été rendue publique le 9 mars dernier. Retour sur les faits et explications.
Le 24 août 2016, 6 jours après un premier vol d’essai réussi, l’Airlander 10 rate son atterrissage lors de son deuxième vol d’essai. Les conséquences sont heureusement cantonnées à des dommages matériels sur le cockpit, le pilote et l’ingénieur d’essai s’en sortant sans une égratignure. Les images de cet écrasement ont fait le tour du monde, cet événement étant même dénommé « le crash le plus lent du monde ».
Pour rappel, l’Airlander 10 est un aéronef de type dirigeable hybride souple (40% de sa portance est assurée par la forme aérodynamique de son enveloppe). Il est propulsé par 4 moteurs à piston Technify Centurion C4.0. L’Airlander 10 a été développé et produit en 2009 par la firme britannique Hybrid Air Vehicles, en partenariat avec Northrop Grumman afin de répondre à l’appel d’offre LEMV (Long Endurance Multi-purpose Vehicle) du DoD Américain. Le HAV-304 (sa dénomination à l’époque) a effectué un unique vol de démonstration en 2012 à Lakehurst, puis a été racheté en 2013 par HAV et rapatrié en Angleterre pour y être reconditionné et remis en vol.
Avec ses 92 m de long, 44 m de large et 24 m de hauteur, l’Airlander 10 est considéré comme le plus gros aéronef du monde actuellement en vol. Il affiche une vitesse de croisière de 148 km/h (soit 80 kts), un plafond de 6 100 m (soit 20 000 ft), une endurance de 5 jours et une charge utile de 10 tonnes pour une masse à vide de 20 tonnes.
Avant d’entrer dans les détails de l’accident, il est bon de rappeler comment se déroulent la plupart des « atterrissages » ou plutôt amarrages des dirigeables :
Comme tout aéronef, l’atterrissage constitue l’une des phases de vol les plus critiques. La sensibilité des dirigeables aux aléas météorologiques accentue davantage la complexité de cette phase. De manière générale, un atterrissage de dirigeable peut se décomposer en trois étapes : l’approche, le positionnement et l’amarrage. Une fois amarré (accroché à un mât), le débarquement peut s’effectuer. L’approche est une phase durant laquelle un dirigeable ajuste sa position en vue d’un atterrissage. La pente, la distance et la vitesse du dirigeable sont calées sur l’objectif de positionnement attendu, généralement symbolisé au sol par un opérateur. Puis, le pilote du dirigeable positionne son aéronef en vol stationnaire au-dessus de l’objectif et maintient la position. Un ou plusieurs câbles sont alors relâchés. Passés les quelques secondes durant lesquelles le ou les câbles sont en contact avec le sol (déchargement électrostatique), un ou plusieurs opérateurs au sol viennent saisir le ou les câbles. Ces câbles servent en général au maintien en position du nez du dirigeable, puis à son approche au mât d’amarrage, auquel il est enfin fixé via un opérateur montant en haut du mât. Sur les anciens grands dirigeables, deux équipes de plusieurs dizaines de personnes étaient nécessaires à cette manœuvre. Cette méthode est encore utilisée, à bien plus petite échelle, sur quelques dirigeables actuels (Zeppelin NT, Goodyear…). Néanmoins, une pratique répandue consiste à approcher le mât (mobile donc) une fois que le dirigeable est stabilisé à proximité du sol. La « capture » du nez du dirigeable par son mât se fait alors via un guidage par câble. Ce câble est en deux sections, la première fixée au nez du dirigeable, et la seconde reliée via un treuil au mât. Lors du positionnement du dirigeable, ce câble d’amarrage est relâché par le pilote, puis est connecté au câble du mât par un opérateur au sol. Le treuil du mât est enfin actionné pour approcher le nez du dirigeable à la tête de mât, jusqu’à la connexion des deux parties. Ce système et cette procédure sont vraisemblablement appliqués dans le cas de l’Airlander 10.
Rappelons aussi que l’Airlander 10, de par sa nature hybride, nécessite une approche plus ou moins longue.
Incident, Accident, Crash ?
La question est très souvent posée. Rappelons que l’Organisation de l’Aviation Civile Internationale (OACI / ICAO) définie un accident comme un événement lié à l’opération d’un aéronef entre le moment où la première personne embarque et jusqu’au moment où la dernière personne débarque de l’aéronef et durant lequel :
- Une personne est fatalement ou sérieusement blessée ou,
- L’aéronef subit un dommage ou un défaut structurel ou,
- L’aéronef est considéré comme disparu ou totalement inaccessible.
Toujours suivant la définition de l’OACI, il existe plusieurs niveaux d’accidents (Catastrophique, Majeur, Mineur, Incident). L’Airlander ayant subi des dégâts matériels mineurs, cet événement peut être considéré comme un accident mineur. L’AAIB évoque d’ailleurs le terme d’accident tout au long de son rapport.
Revenons aux faits. Le rapport de l’AAIB stipule que lors de ce deuxième vol d’essai, l’Airlander 10 était piloté par un pilote chevronné de 61 ans, détenteur d’une licence de pilote commercial et totalisant 12 700 heures de vol dont 4 sur l’Airlander 10.
Ce 24 Août 2016, sous un temps calme avec un vent variable de 2 kts, l’Airlander 10 décolle de sa base de Cardington à 8h12. D’après le rapport de l’AAIB, ce deuxième vol d’essai se déroule sans accros. 98 minutes après son décollage, l’Airlander 10 exécute une phase d’approche avec succès et se présente à son site d’amarrage. 2h12 après son décollage, l’Airlander 10 percute le sol à faible vitesse avec un angle de 18°. Suite à cet accident, le personnel navigant est évacué, l’Airlander 10 est sécurisé à son mât puis est ramené dans son hangar.
Les causes de l’accident.
Comme toujours en matière de sécurité aéronautique, un accident est la conséquence d’un enchaînement catastrophique d’événements redoutés et le cas de l’écrasement à l’atterrissage de l’Airlander 10 en est un nouvel exemple.
La première cause identifiée par l’AAIB est la défaillance du système de treuil au sol. Le moteur diesel du treuil permettant le treuillage du câble d’amarrage est tombé en panne au moment de la première tentative d’atterrissage.
Suite à cette panne, le pilote prend la décision de reprendre de l’altitude (ce qu’on pourrait alors assimiler à un Rejected Landing) le temps que le treuil soit remplacé ou réparé.
Intervient alors la deuxième cause de cet accident. Lors de la prise d’altitude, la soute contenant le câble d’amarrage du dirigeable s’ouvre et le câble se déploie. Le pilote s’informe alors auprès des équipiers au sol de la longueur de ce câble, afin d’éviter tout risque d’accrochage lors de son approche au sol. Les équipiers donnent alors une estimation erronée de cette longueur à 15 mètres… au lieu de 47 mètres. Cette fois-ci, il s’agit d’une erreur humaine.
Ignorant de cette erreur, le pilote prend tout de même la décision d’effectuer une nouvelle approche dite « haute », à 120 ft (36m) du sol. Inévitablement, le câble d’amarrage s’accroche à des « câbles » (non précisés dans le rapport de l’AAIB) à proximité de l’aire d’amarrage.
Fort heureusement, cet événement n’impacte pas durablement le vol, le câble d’amarrage se décrochant de sa prise. Néanmoins, cet incident a manifestement dû ajouter au stress des équipages (au sol et en vol). Le pilote décide de prendre de l’altitude pour éloigner le câble d’amarrage du sol, ce qui induit une approche à forte pente. L’Airlander 10 se présente ainsi au niveau de l’aire d’atterrissage avec une hauteur de 180 ft (55 m). Avec une faible vitesse (vol quasi stationnaire, pas de vent relatif), le pilote n’arrive pas à faire perdre de l’altitude à son aéronef, les gouvernes n’ayant aucune efficacité. Le pilote modifie donc le centrage (position du centre de gravité) résultant en un piqué à 10° du dirigeable pour approcher le câble d’amarrage du sol. Ce centrage avant engendre une instabilité, augmentant son incidence jusqu’à un piqué de 18°. L’Airlander 10, de par sa nature d’hybride, perd soudainement de la portance du fait de la trop grande incidence, engendrant une perte d’altitude. C’est le décrochage et l’écrasement de l’aéronef intervient peu après, soit 2h et 12 minutes après son désarrimage du mât. Notons aussi que le pilote arrive néanmoins à ralentir cette chute par l’utilisation de la propulsion (rotation des moteurs avant).

Airlander 10 lors de son “hard landing”
Suivant le Modèle de Reason, méthodologie reconnue dans le milieu de la sécurité aérienne, nous pouvons identifier 6 évènements redoutés qui ont mené à l’enchaînement catastrophique de cet accident.
- Cause n°1 : défaillance de la motorisation du treuil
- Cause n°2 : ouverture intempestive de la soute contenant le câble d’amarrage
- Cause n°3 : mauvaise appréciation des équipiers au sol de la longueur de câble
- Cause n°4 : accrochage du câble d’amarrage à un obstacle au sol
- Cause n°5 : modification du centrage (piqué à 10°)
- Cause n°6 : réactivité trop longue du pilote dans la rotation de la propulsion
Rappelons que le Modèle de Reason se symbolise par une succession de plaques parallèles représentants des barrières de sécurité (procédures, redondances techniques, architectures systèmes, contrôles qualité…). Chaque plaque est perforée, symbolisant les défaillances de chaque barrière, soit les causes latentes. L’accident intervient lorsque toutes les plaques disposent d’au moins une perforation alignée. On considère alors que chaque barrière vient à défaillir dans un enchaînement catastrophique. Ce modèle met en relief la complexité des relations de cause à effet dans l’enchaînement des événements amenant à l’accident.
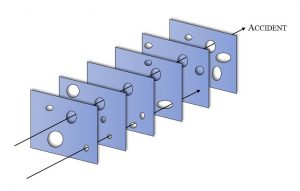
Modèle de Reason
Dans le cas présent, les 6 événements redoutés identifiés constituent chacun une cause latente ayant menée à l’accident. D’autre causes peuvent être évoquées, de même que chacune des 6 causes peut être la conséquence de plusieurs autres causes (erreur humaine, défaillance structurelle, erreur de maintenance…).
Quelles conséquences ?
Suite à cet accident, l’Airlander 10 a été cloué au sol, le temps de l’enquête et des réparations. Hybrid Air Vehicles n’a d’ailleurs pas attendu les conclusions du rapport de l’AAIB pour lancer les réparations. D’autre part, la firme britannique a annoncé avoir effectué 63 modifications, directement sur l’aéronef, mais aussi dans les procédures et les formations des personnels.
L’interface d’amarrage a ainsi été modifiée par l’ajout d’un treuil embarqué afin de rembobiner le câble d’amarrage, et 3 bumpers déployables « Auxiliary Landing System » ont été ajoutés sous le cockpit et à l’avant de l’aéronef, en plus des deux bumpers latéraux préexistants. Ces bumpers sont en réalité des airbags faisant office d’atterrisseurs. Cette modification permet a priori la sécurisation des atterrissages les plus complexes.

Bumper latéral déployé,
Crédit HAV

Cockpit réparé de l’Airlander 10,
Crédit HAV

Airlander 10 avec son nouveau mât mobile d’amarrage,
Crédit HAV
Désormais, Hybrid Air Vehicles effectue des tests au sol avant une reprise des vols attendue pour la fin du mois (avril).
_______________________________________________________________________________
































![[Conférence] - Le transport par dirigeable : utopie ou réalité future ?](https://www.portail-aviation.com/wp-content/uploads/2015/12/Lockheed-Martin-LMH-1-95x64.jpg)







![[Dossier Dirigeable] Episode 7 : La sécurité des dirigeables](https://www.portail-aviation.com/wp-content/uploads/2015/09/Lakehurst_NJ_37May6_Hindenburg_burning-petit-95x64.jpg)
![[Dossier Dirigeable] Episode 6 : Le dirigeable de transport de charges lourdes](https://www.portail-aviation.com/wp-content/uploads/2015/09/Aeros-petit-95x64.jpg)

![[Dossier Dirigeable] Episode 5 : Les dirigeables de demain, entre utopies et réalités](https://www.portail-aviation.com/wp-content/uploads/2015/08/manedcloud1-95x64.jpg)
![[Dossier Dirigeable] Episode 4 : Les dirigeables en 2015](https://www.portail-aviation.com/wp-content/uploads/2015/08/Zeppelin_NT-Title-95x64.jpg)
![[Dossier Dirigeable] Episode 3 : Atouts et Limites des Dirigeables](https://www.portail-aviation.com/wp-content/uploads/2015/07/Proto-LEMV-95x64.jpg)
![[Dossier Dirigeable] Episode 2 : Un dirigeable, qu'est-ce que c'est ?](https://www.portail-aviation.com/wp-content/uploads/2015/07/Zeppelin-NT-Crédit-Zeppelin-Luftschifftechnik-95x64.jpg)
![[Dossier Dirigeable] Episode 1 : l’Histoire des dirigeables, pionniers de l’aéronautique.](https://www.portail-aviation.com/wp-content/uploads/2015/07/dirigeable-95x64.jpg)

_______________________________________________________________________________
Thibault Proux





One Comment
Arnaud SIEGEL
Super article Thibault. Ultra complet ! Merci.
Par contre, je me permets de le compléter par des précisions importantes sur ses performances.
Les performances qu’ils présentent : 10 tonnes de charges utile, 5 jours de vol, plafond etc.. ne peuvent être combinées. En effet leurs 10 tonnes de charge utile sont sans le carburant ! Sur une vidéo BBC News, ils annoncent 1225 kg de payload pour une conso de 3100 litres/ jour en consommation. Donc grosso modo pour un vol de 5 jours, nous avons 1 tonne de charge utile et 9 tonnes de carburant.
De même pour le taux d’hybridation : leur 40% sont sur leur poids, et non la masse totale de l’aéronef. Pour argument, leur puissance est de 4x325ch=1300 ch. Avec la relation 1000ch=1tonne de poussée et une finesse estimée à 3 (expérience trilobée Voliris), nous avons une portance aérodynamique de 4 tonnes = 40% de 10 tonnes.
Ils jouent sur ces deux ambiguïtés, mais la physique est là pour nous éclairer.
Nous avons tous hâte de le revoir voler. Le « crash/accident » fait partie intégrante d’un programme de R&D.